
A Robotic Home Assistant with Memory Aid Functionality
Iris Wieser, Sibel Toprak, Andreas Grenzing, Tobias Hinz, Sayantan Auddy, Ethem Karaoğuz, Abhilash Chandran, Melanie Remmels, Ahmed El, Josip Josifovski, Leena Chennuru, Faiz Wahab, Alireza Bahnemiri, Debasish Sahu, Stefan Heinrich, Nicolás Navarro-Guerrero, Erik Strahl, Johannes Twiefel, Stefan Wermter
Conference: Proceedings of the 39th German Conference on Artificial Intelligence (KI2016), pp. 102-115, Klagenfurt, AT, Sep 2016
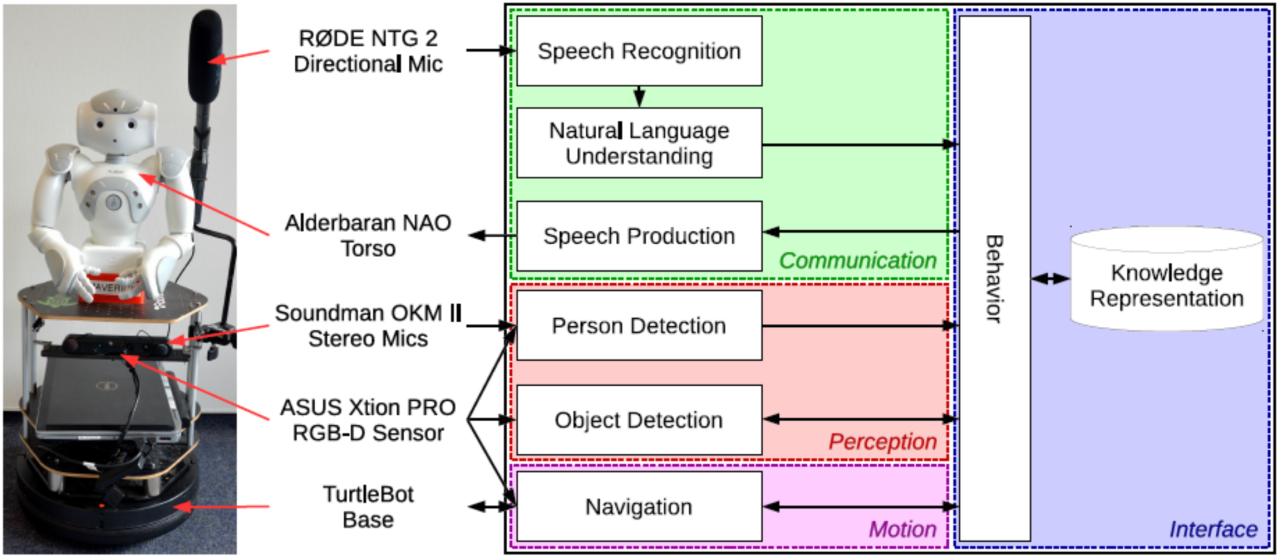
Abstract: We present the robotic system IRMA (Interactive Robotic Memory Aid) that assists humans in their search for misplaced belongings within a natural home-like environment. Our stand-alone system integrates state-of-the-art approaches in a novel manner to achieve a seamless and intuitive human-robot interaction. IRMA directs its gaze toward the speaker and understands the person’s verbal instructions independent of specific grammatical constructions. It determines the positions of relevant objects and navigates collision-free within the environment. In addition, IRMA produces natural language descriptions for the objects’ positions by using furniture as reference points. To evaluate IRMA’s usefulness, a user study with 20 participants has been conducted. IRMA achieves an overall user satisfaction score of 4.05 and a perceived accuracy rating of 4.15 on a scale from 1–5 with 5 being the best.