
NICO - Neuro-Inspired COmpanion: A Developmental Humanoid Robot Platform for Multimodal Interaction
Matthias Kerzel, Erik Strahl, Sven Magg, Nicolás Navarro-Guerrero, Stefan Heinrich, Stefan Wermter
Conference: Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN2017), pp. 113-120, Aug 2017
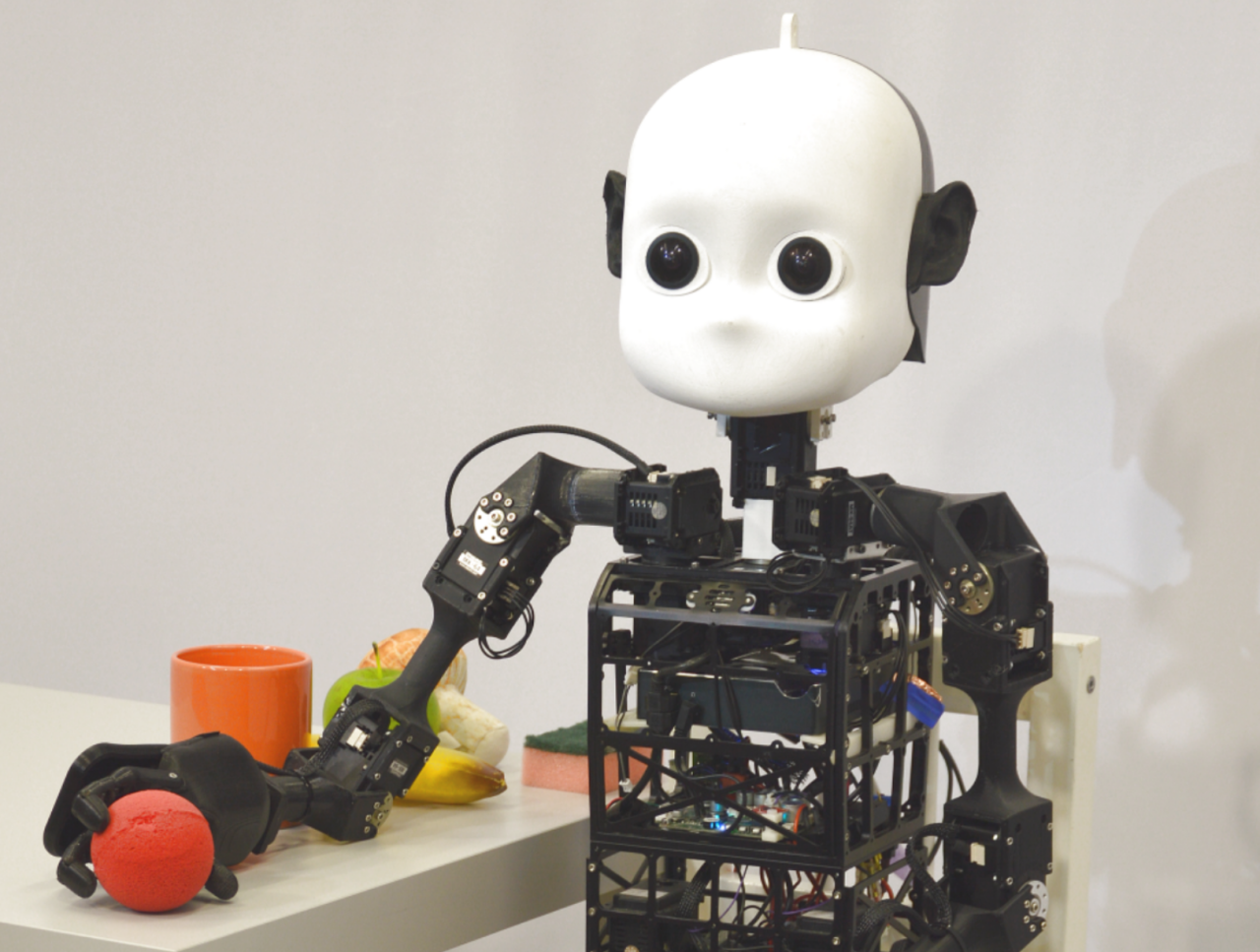
Abstract: Interdisciplinary research, drawing from robotics, artificial intelligence, neuroscience, psychology, and cognitive science, is a cornerstone to advance the state-of-the-art in multimodal human-robot interaction and neuro-cognitive modeling. Research on neuro-cognitive models benefits from the embodiment of these models into physical, humanoid agents that possess complex, human-like sensorimotor capabilities for multimodal interaction with the real world. For this purpose, we develop and introduce NICO (Neuro-Inspired COmpanion), a humanoid developmental robot that fills a gap between necessary sensing and interaction capabilities and flexible design. This combination makes it a novel neuro-cognitive research platform for embodied sensorimotor computational and cognitive models in the context of multimodal interaction as shown in our results.