
Walking Speed Learning and Generalization Using Seq2Seq Gated and Adaptive Continuous-Time Recurrent Neural Network (S2S-GACTRNN) for a Hip Exoskeleton
Wuxiang Zhang, Zhitao Ling, Stefan Heinrich, Xilun Ding, Yanggang Feng
Journal: IEEE/ASME Transactions on Mechatronics, vol. 28, no. 4, pp. 2375 - 2386, Jan 2023
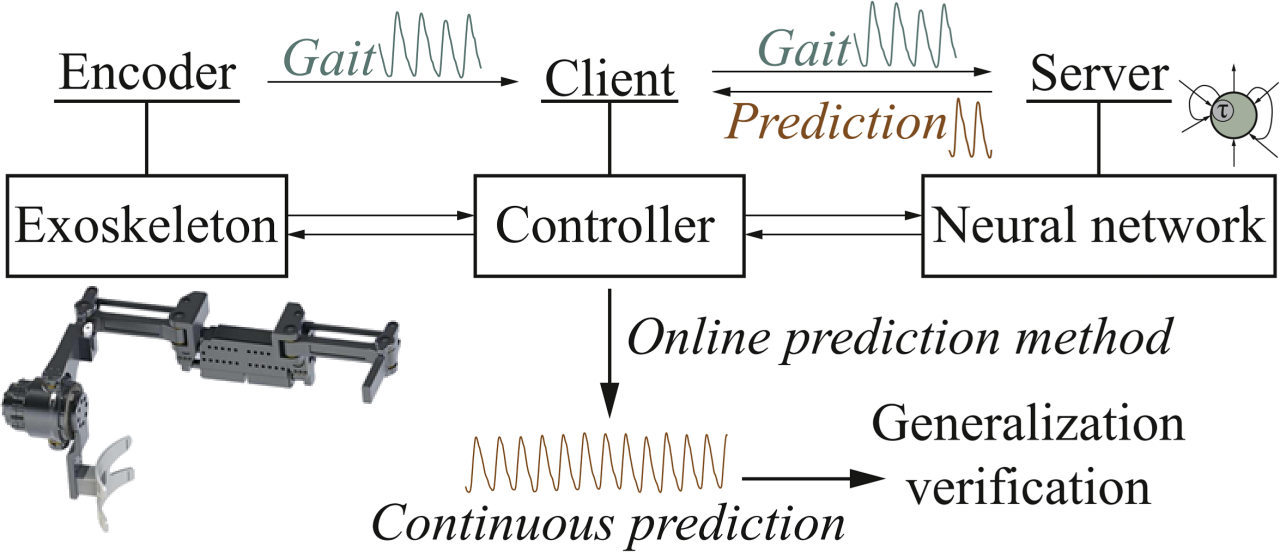
Abstract: The objective of this article is to provide a new approach for walking speed learning and generalization in the speed-adaptation control of exoskeletons. By combining the gated and adaptive continuous-time recurrent neural network (GACTRNN), which has the potential to process periodic signals, and the “sequence to sequence” structure, the S2S-GACTRNN model is proposed for walking gait generation at different speeds. The “proactive loop” and “reactive loop” were presented for learning and generalization capability evaluation, respectively, in the experiments of sinusoidal signals and walking gait signals. First, simulation experiments were carried out to evaluate the S2S-GACTRNN's learning and generalization capabilities of sinusoidal signals with different frequencies. Second, in offline experiments, the model was applied to deal with walking gait signals to evaluate the capabilities of learning and generalization of walking speeds. Third, a client-server system was constructed and an online prediction method was proposed for online experiments to further evaluate the trained model's performance in walking speed generalization. The mean absolute errors of S2S-GACTRNN trained using walking data at three speeds were reduced by 24%, 38%, and 24% compared with that trained using walking data at one speed. The results show that the model has learning and generalization potential for gait signals of different walking speeds and may be utilized as a new approach to the adaptive control of walking speeds in the field of exoskeletons.